CrashD Description
CrashD is a synthetic LiDAR dataset to quantify the generalizability of a 3D object detector on out-of-domain samples. As it includes various types of cars, such as normal, old, sports and damaged, it comprises a variety of plausible vehicle shapes, thereby serving as a valuable out-of-domain test. Specifically, the crashes are individually generated with a realistic simulator and distinguished depending on the intensity, namely light, moderate, hard, as well as the kind of damage: clean (i.e., undamaged), linear (i.e., frontal or rear), and t-bone (i.e., lateral). The randomly and automatically generated 15340 scenes were captured by a 64-beam LiDAR configured to mimic the one in KITTI. Each scene presents between 1 and 5 vehicles, with visible damages, before being repaired and placed at the same locations to collect the clean set, resulting in a total of 46936 cars. We are releasing this data publicly, as an out-of-domain evaluation benchmark for models trained on KITTI, Waymo, or similar datasets. Further details can be found in the Supplementary Material of our CVPR 2022 paper.
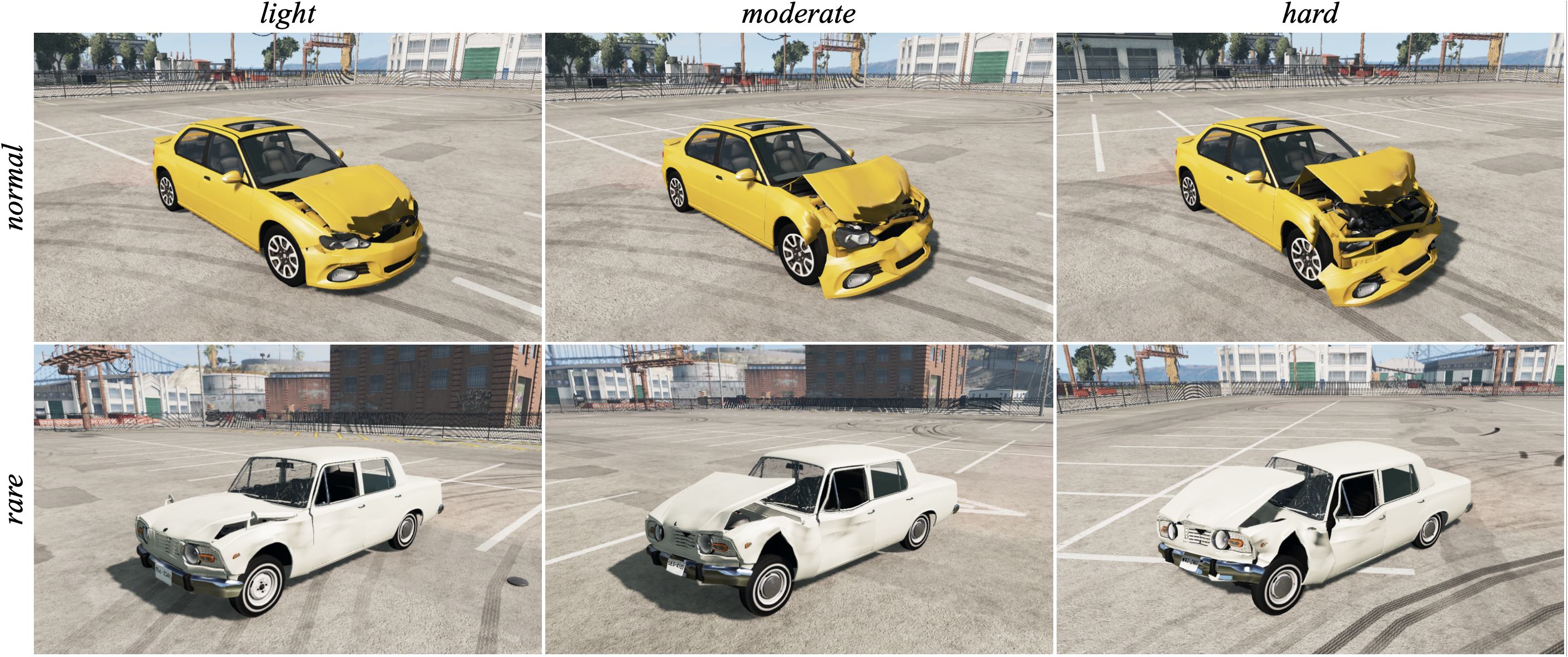
Comparison of linear damage intensities for normal and rare cars of CrashD. For each type of car, the accidents were created by the same hitting vehicle, coming from the same angle. It can be seen that the hard crash compromised the structure of the weaker rare car, while the normal car absorbed the impact differently, leaving the cabin unchanged.